Позвоните в службу поддержки
+86-0816-2309228
+86-13881117429
+86-0816-2309228
+86-13881117429
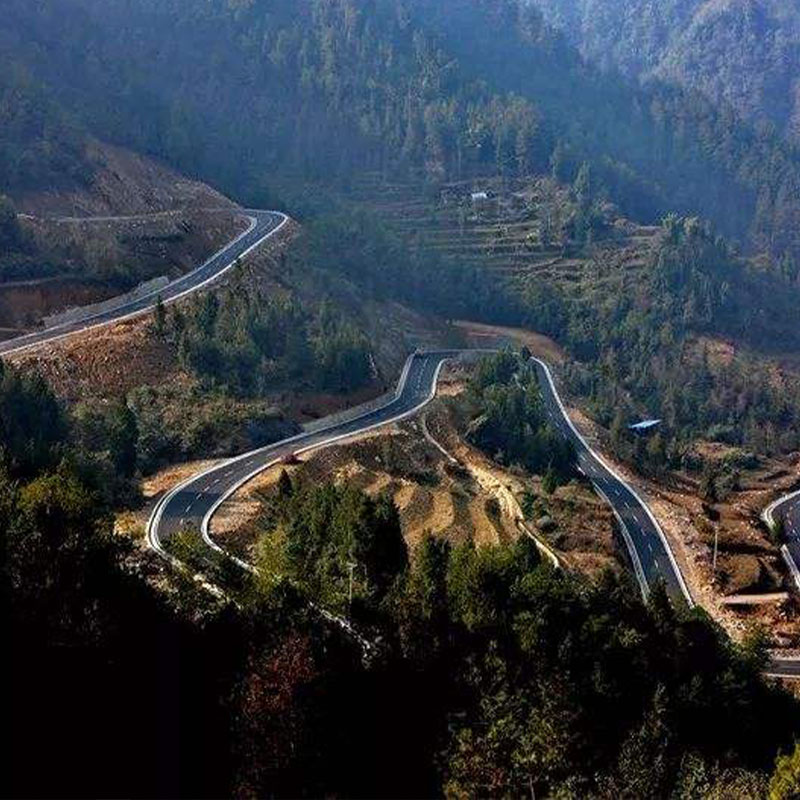
Обнаружение дорог — это комплексная задача компьютерного зрения, направленная на автоматическое выделение дорожных покрытий на изображениях или видео. Эффективные алгоритмы обнаружения дорог необходимы для автономного вождения, навигационных систем, картографии и геоинформационных систем. Современные методы используют различные типы данных и подходы, включая обработку изображений, машинное обучение и глубокое обучение, стремясь обеспечить высокую точность и надежность в разных условиях.
Существует несколько основных подходов к обнаружению дорог, каждый из которых имеет свои преимущества и недостатки.
Эти методы используют традиционные алгоритмы компьютерного зрения для выделения признаков дорожного покрытия, таких как цвет, текстура, края и формы. Примеры включают:
Преимущества: Простота реализации, низкие вычислительные затраты.
Недостатки: Низкая устойчивость к изменениям освещения, погодным условиям и наличию препятствий.
В этих методах используются алгоритмы машинного обучения для классификации пикселей или областей изображения как дорожные или не дорожные. Примеры включают:
Преимущества: Более высокая точность по сравнению с классическими методами, способность к адаптации к различным условиям.
Недостатки: Требуется большой объем размеченных данных для обучения, сложнее в реализации.
Эти методы используют глубокие нейронные сети, такие как сверточные нейронные сети (CNN), для автоматического извлечения признаков и классификации дорожного покрытия. Примеры включают:
Преимущества: Высокая точность и надежность, способность к обработке сложных сцен и адаптации к различным условиям освещения и погоды. Эти алгоритмы активно используются в беспилотных автомобилях и системах помощи водителю. ООО Мяньян Чуаньцзяо Шоссе Планирования и Изыскания Проектирования ( https://www.mycj.ru/ ) использует подобные технологии для оптимизации дорожного строительства.
Недостатки: Требуется очень большой объем размеченных данных для обучения, высокие вычислительные затраты, сложность в реализации и настройке.
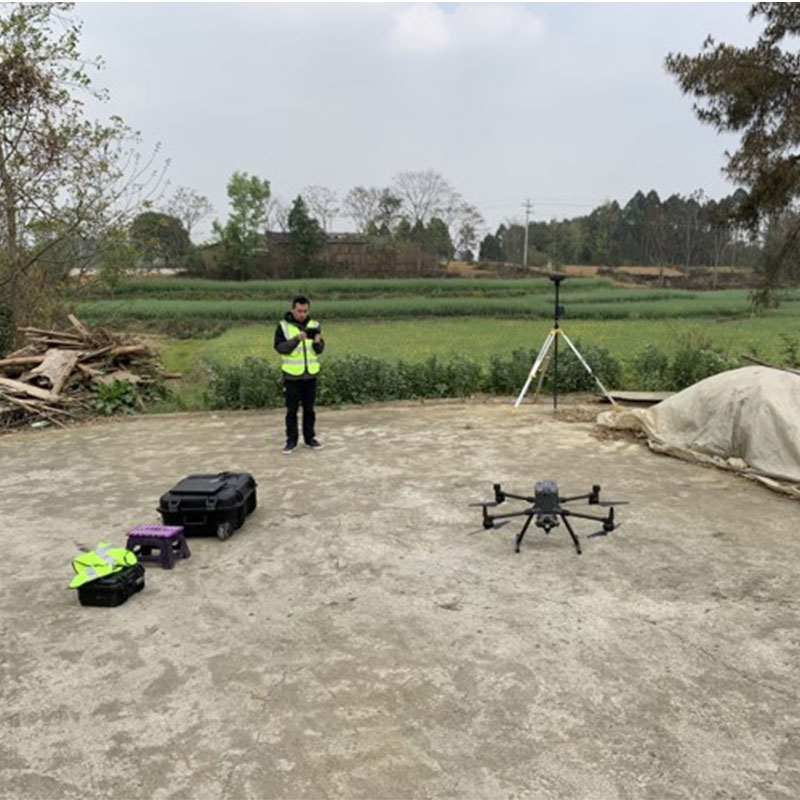
Для обнаружения дорог используются различные типы сенсоров и технологий:
Камеры являются основным сенсором для обнаружения дорог. Они могут быть как монокулярными (одна камера), так и стереоскопическими (две камеры), позволяющими определять глубину сцены. Камеры используются для сбора визуальной информации о дорожном покрытии, разметке и окружающих объектах.
Лидары используют лазерные лучи для измерения расстояния до объектов и создания трехмерной карты местности. Они обеспечивают высокую точность и надежность в определении формы и расположения дорожного покрытия.
Радары используют радиоволны для обнаружения объектов и измерения расстояния до них. Они хорошо работают в условиях плохой видимости, таких как туман или дождь.
GPS (Global Positioning System) обеспечивает информацию о местоположении транспортного средства, а IMU (Inertial Measurement Unit) измеряет его ускорение и угловую скорость. Эти данные используются для привязки информации, полученной от других сенсоров, к географическим координатам и ориентации.
Обнаружение дорог находит широкое применение в различных областях:
Обнаружение дорог является ключевой технологией для автономного вождения. Оно позволяет транспортному средству определять границы дорожного покрытия, следовать по маршруту и избегать препятствий.
Обнаружение дорог используется в навигационных системах для улучшения точности и надежности определения местоположения и прокладки маршрутов. Оно позволяет системе учитывать изменения в дорожной сети и адаптироваться к текущим условиям.
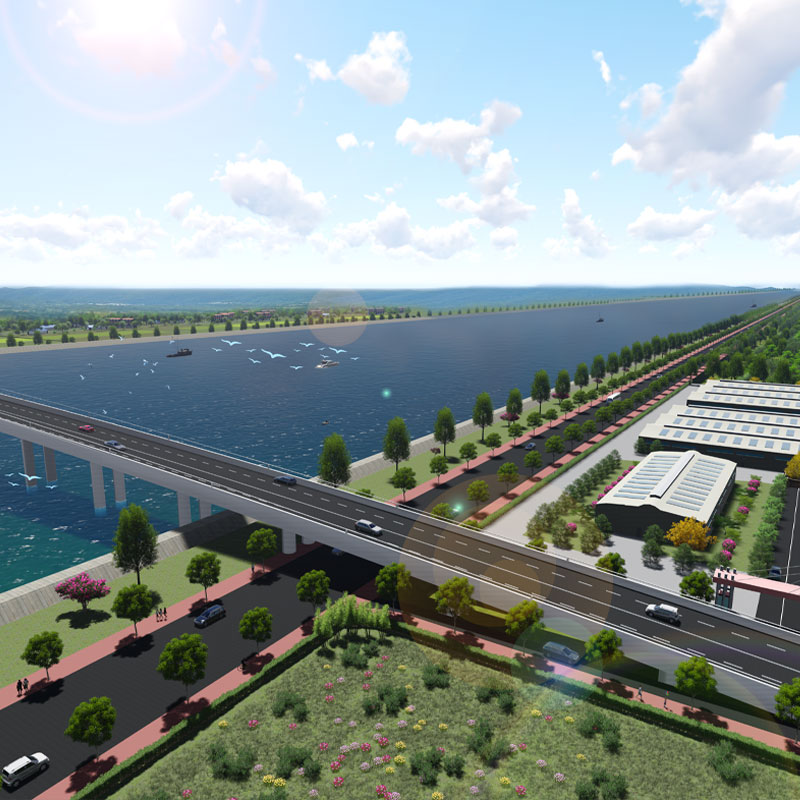
Обнаружение дорог используется для автоматического обновления карт и баз данных ГИС. Оно позволяет быстро и точно определять изменения в дорожной сети и создавать актуальные карты.
Обнаружение дорог может использоваться для мониторинга состояния дорожного покрытия и выявления дефектов, таких как трещины, ямы и выбоины. Это позволяет своевременно проводить ремонтные работы и поддерживать дороги в хорошем состоянии.
Рассмотрим несколько примеров использования алгоритмов обнаружения дорог на практике.
Одна из распространенных задач обнаружения дорог – это семантическая сегментация изображений. В этом случае CNN обучается классифицировать каждый пиксель изображения как принадлежащий дороге или не принадлежащий ей. Архитектура U-Net часто используется для этой задачи благодаря своей способности сохранять детали изображения и обеспечивать высокую точность сегментации.
Лидары могут использоваться для создания трехмерной модели дорожного покрытия. Алгоритмы обработки облаков точек используются для выделения дорожной поверхности и определения ее границ. Эта информация может быть использована для автономной навигации и мониторинга состояния дорог.
Радары могут обнаруживать дорожные знаки и другие объекты даже в условиях плохой видимости. Алгоритмы машинного обучения могут быть обучены классифицировать радарные сигналы и определять положение и тип объектов на дороге.
В будущем можно ожидать дальнейшего развития методов и технологий обнаружения дорог. Это включает в себя:
Развитие технологий обнаружения дорог играет важную роль в создании безопасных и эффективных транспортных систем будущего. Улучшение алгоритмов обнаружения дорог напрямую влияет на развитие беспилотного транспорта, что является одним из приоритетных направлений развития современной транспортной индустрии.
В таблице ниже представлено сравнение различных методов обнаружения дорог по основным параметрам:
| Метод | Точность | Требования к данным | Вычислительная сложность | Устойчивость к условиям |
|---|---|---|---|---|
| Классические методы | Низкая | Минимальные | Низкая | Низкая |
| Машинное обучение | Средняя | Средние | Средняя | Средняя |
| Глубокое обучение | Высокая | Высокие | Высокая | Высокая |
Таблица: Сравнение методов обнаружения дорог
В заключение, обнаружение дорог является важной и сложной задачей, требующей использования передовых методов и технологий. Дальнейшее развитие этой области будет способствовать созданию более безопасных и эффективных транспортных систем.